Recently, a new method to determine overlap factor for vertically pointing lidar is explored by lidar study team from center of atmosphere optics of Anhui Institute of Optics and Fine Mechanics (AIOFM). This study entitled New experimental method for lidar overlap factor using a CCD side-scatter technique has been published in OPTICS LETTERS.
Incomplete overlap between laser beam and receiver field of view leads to lidar signal loss and interference of lidar measurement in near-field range. However, it is essential to measure lidar accurately in near-field range. To shed lights on this problem, a new experimental method was employed by lidar study team from AIOFM to determine Geomatric Form Factor (GFF) for vertically pointing lidar, which was through iterative algorithm based on the difference between particle backscatter coefficient affected by incomplete overlap (Mie lidar) and actual particle backscatter coefficient (CCD side-scatter technique). Keeping a proper distance between a CCD camera and a vertically pointing Mie lidar, which are operated at the same wavelength. The CCD side-scatter technique has no overlap problem, and profiles of particle backscatter coefficient can be retrieved from CCD picture. The lidar measurements would perform simultaneously in a cloudless night. With iterative method, GFF for elastic channel of vertically pointing lidar can be derived from elastic signal received by vertically pointing lidar and particle backscatter coefficient profile measured by CCD side-scatter technique.
The effect of overlap factor on Mie lidar is corrected successfully in different atmosphere conditions. Good agreement between slope method and our new method proves this method is available in practice, and GFF measurements for lidars can be determined easily in cloud-free night time by adding a CCD detector with a proper way.

Particle backscatter coefficients and corresponding returned Mie signals with (red line)/without (black line) overlap factor (Imaged by WANG Zhenzhu)
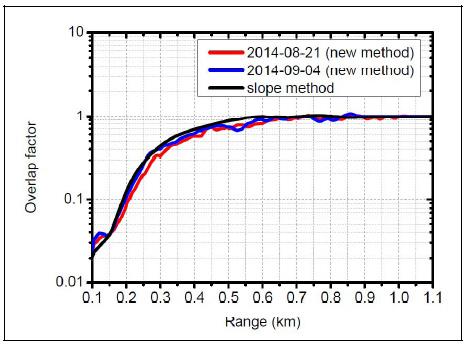
GFF obtained by slope method and new method discussed in this Letter (Imaged by WANG Zhenzhu)
Contact:
Dr. Zhenzhu WANG
Anhui Institute of Optics and Fine Mechanics,Chinese Academy of Sciences
Hefei, Anhui 230031, China
Tel: 0551-65591007
E-mail: zzwang@aiofm.ac.cn