


A team from Hefei Institutes of Physical Science (HFIPS) of Chinese Academy of Sciences (CAS) proposed a control strategy based on dynamics-based trajectory planning and fuzzy self-tuning PD (FST PD) controller recently. And they achieved residual vibration suppression and trajectory tracking of a flexible link manipulator with this strategy.
The detail was published in Applied Mathematical Modelling.
The flexible manipulator composed of lightweight materials has many advantages such as energy saving, light weight, small size, large working space, easy transportation and low manufacturing cost. However, due to the low stiffness of the system components, the flexible manipulator will vibrate elastically during motion or when subjected to external disturbances, which will in turn reduce the control accuracy and system stability. Therefore, the research on the dynamic characteristics and motion control of lightweight flexible manipulator is one of the research hotspots and difficulties in the field of robotics.
In this research, scientists combined this control strategy with a linear extended state observer to improve the trajectory tracking performance under external disturbances.
They also used floating coordinate method, modal synthesis technique and zero space projection technique to solve the problem of modeling and dynamics of the manipulator system in 3D space.
"We see good prospects for this strategy," said SHI Mingming from the team, "the proposed modeling approach can be further extended and applied to the dynamic characteristics analysis of complex flexible manipulator systems with multiple degrees of freedom, and the proposed control strategy allowed better elastic vibration suppression and trajectory tracking control in the presence of model uncertainty or external disturbances."
At the same time, the proposed method was easy to implement. It reduced the use of sensors/energy storage and other equipment in the system and lowered the cost. All these provided a theoretical basis for the subsequent development of flexible maintenance robotic arms.
The above research work was supported by the Comprehensive Research Facility for Fusion Technology Program of China (CRAFT) under Contract No. 2018-000052-73-01-001228.
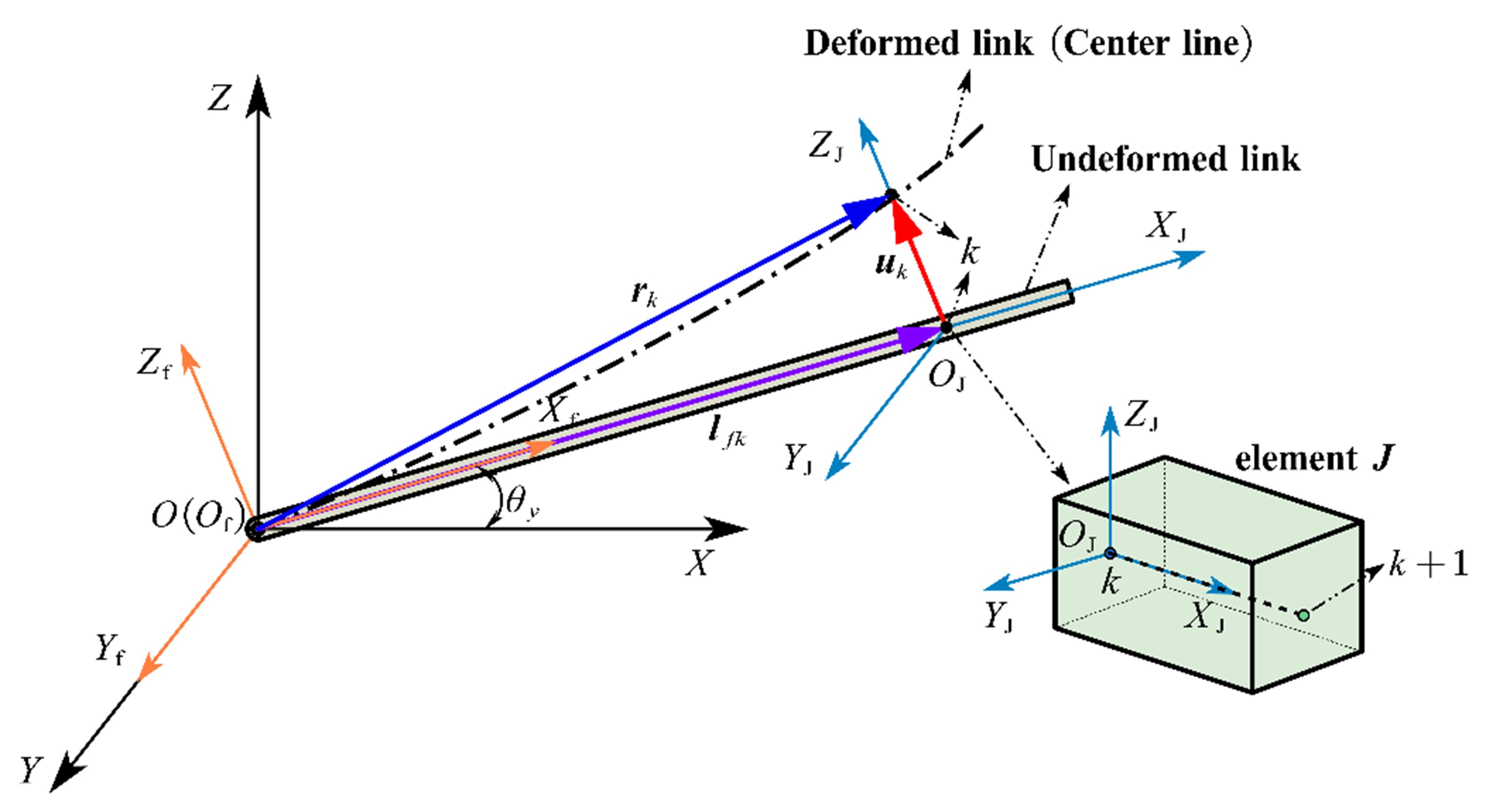
Dynamic characteristics and motion control of lightweight flexible manipulators (Image by SHI Mingming)