


Recently, a research group led by Prof. ZHU Hui and Prof. YU Biao from Hefei Institutes of Physical Science (HFIPS), Chinese Academy of Sciences (CAS), developed a data-driven hierarchical multi-scale mobility prediction model for unmanned ground vehicles to rapidly and accurately predict global mobility in large-scale off-road environments.
The research results were published in IEEE Robotics and Automation Letters (IEEE RA-L), IEEE Transactions on Vehicular Technology (IEEE TVT), and IEEE International Conference on Robotics and Automation (ICRA 2024).
The mobility performance of UGVs executing tasks in off-road environments is influenced by the terrain of the soil. When UGVs traverse soft soil terrains, soil deformation can occur, leading to UGVs sinking or even rendering it unable to move. Although there are many simulation methods such as finite element or discrete element available to predict the global mobility of UGVs, these methods struggle to simultaneously balance simulation time and accuracy.
In this study, researchers proposed a multi-strategy enhanced method for predicting the global mobility of UGVs.
Firstly, the terrain parameters affecting vehicle mobility were estimated as multidimensional Gaussian distribution functions and sampled using Gaussian sampling. Building on this, a hierarchical multiscale terrain modeling method was introduced, coupling finite element and discrete element methods to take advantages of current simulation methods.
To increase the computation speed of this coupled terrain model, an improved neural network was used to approximate complex discrete element calculations. The vehicle multi-body dynamics simulation model traversed simulations based on the sampled and modeled terrains to obtain a mobility dataset. The dataset was then enhanced with boundary data improvement techniques and utilitzed to predict a large-scale global mobility map.
A highly efficient global mobility map was successfully obtained, taking only 20% of the time needed by traditional methods. This approach achieved an impressive 90% accuracy in predicting terrain mobility over areas larger than 100 square kilometers.
"Our research provides valuable theoretical support and analytical tools for the prediction of mobility and mission planning of unmanned ground vehicles in off-road environments," said Prof. YU Biao.
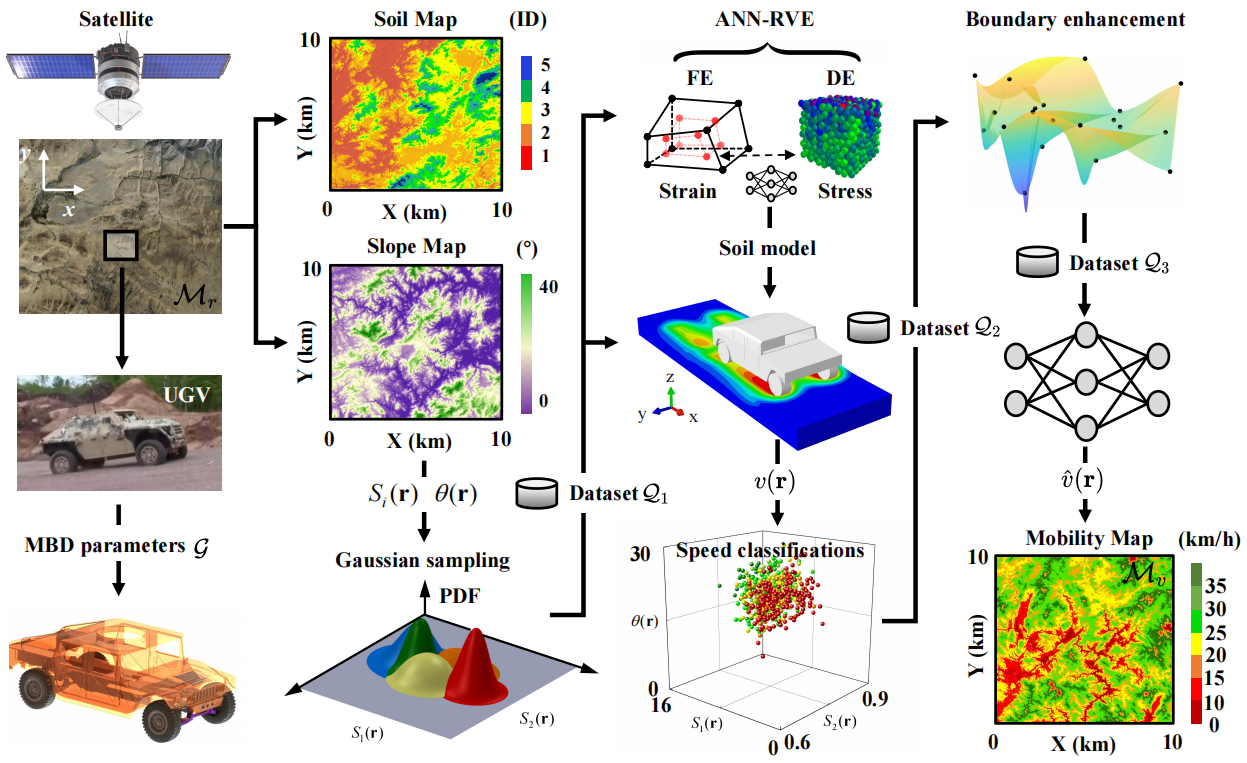
Fig. 1 A Global mobility Prediction Framework Enhanced by Double Neural Networks (Image by YU Biao)
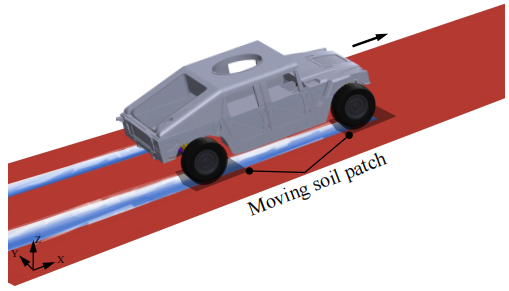
Fig. 2 Mobility Simulation Process Based on ANN-RVE Terrain Model (Image by YU Biao)
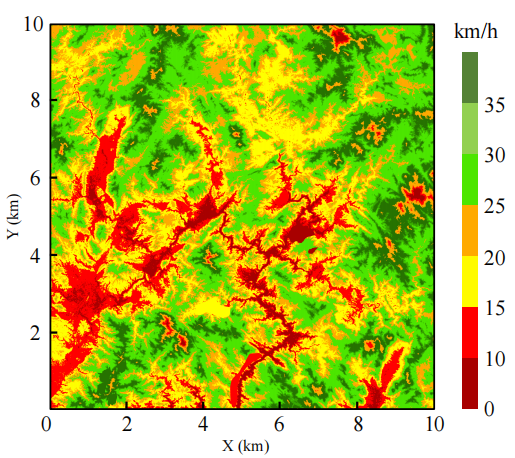
Fig. 3 Global Mobility Prediction Map (Image by YU Biao)
