


A research team led by Prof. LIU Yong from the Hefei Institutes of Physical Science of the Chinese Academy of Science has developed an innovative method to enhance multi-robot global localization (MR-GL).
Their new approach, named SGT-MGL (Semantic-Geometric Triple-constraint based Multi-Robot Global Localization), significantly improves the accuracy and robustness of robot positioning in dynamic and large-scale environments.
The findings were recently published in IEEE Robotics and Automation Letters (IEEE RA-L).
MR-GL helps robots figure out their positions in relation to each other on a shared map. Vision-based Simultaneous Localization and Mapping is popular because it's low-cost and provides a lot of useful information. However, it faces challenges in large and dynamic environments, especially when robots' starting positions are unknown, there are big differences in their views, or the environment changes quickly.
To overcome these challenges, the team developed SGT-MGL, a global localization framework based on graph matching. This method improves accuracy and robustness by integrating semantic and geometric information through a triple-constraint mechanism.
The system first extracts semantic and geometric features from objects in a scene and constructs a topological graph to represent their spatial relationships. To enhance the distinctiveness of objects, a triangle-based descriptor was designed, incorporating semantic labels and relative distances. This improves stability across different viewpoints.
To further enhance robustness, the team introduced a 3D histogram descriptor that combines semantic categories, spatial angles, and pairwise distances. This fusion makes the system more reliable in changing environments.
A coarse-to-fine strategy was implemented to minimize errors and improve accuracy. Initially, key points are filtered using global geometric structures. Then, a multi-level graph matching process refines the localization by combining both local and global information. This ensures precise estimation of robot positions and orientations in six degrees of freedom (6-DoF).
Experiments confirm that SGT-MGL significantly enhances localization accuracy in complex and dynamic settings. The triple-constraint mechanism ensures robustness across varying viewpoints while maintaining computational efficiency.
This advancement provides key technical support for multi-robot collaboration in future applications, such as smart hospitals and intelligent factories, according to the team.
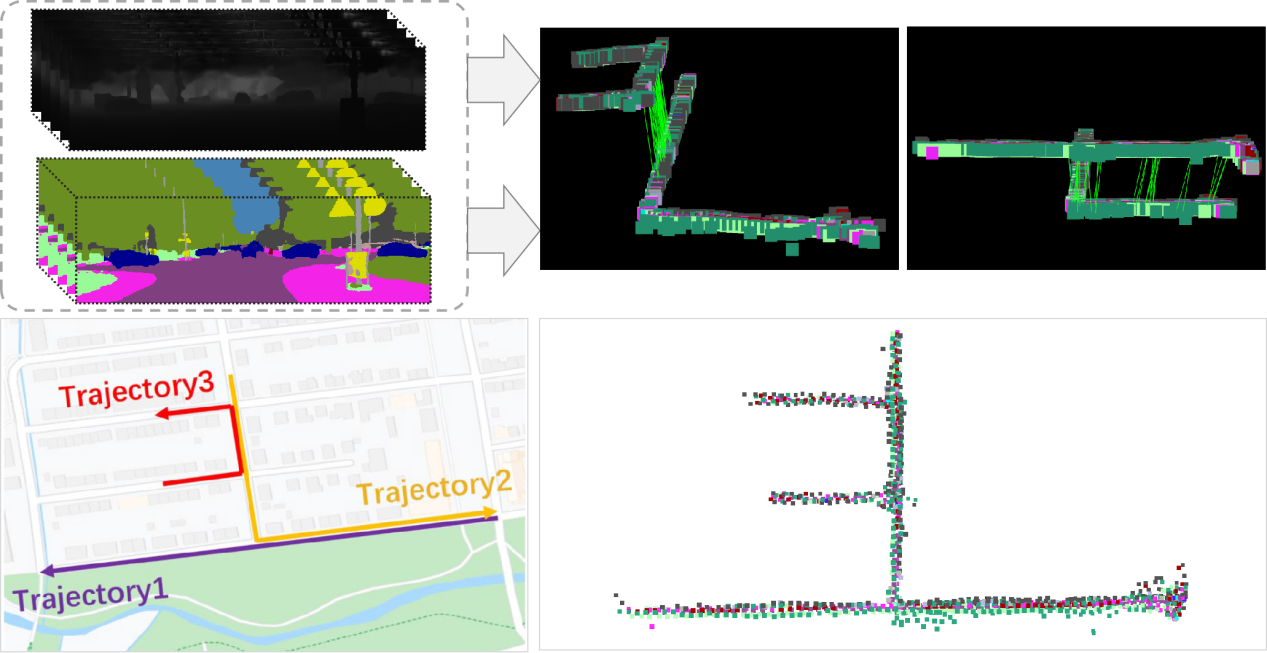
Application of the proposed method for multi-robot global localization on the KITTI08 sequence dataset, using semantic segmentation and depth image as inputs. The bottom right corner shows the composite map generated by merging multiple individual maps. (Image by WANG Fan)