


At the 2025 World AI Conference & High-Level Meeting on Global AI Governance (WAIC 2025), the "Loong Pro" humanoid robot, developed by the National and Local Joint Humanoid Robot Innovation Center, made its official debut. As an ecosystem partner, a research team led by Prof. SONG Bo from the Institute of Intelligent Machines, the Hefei Institutes of Physical Science of the Chinese Academy of Sciences, played a key role by equipping Loong Pro with cutting-edge 3D spatial occupancy grid mapping and navigation technology based on camera and lidar perception.
Standing 1.85 meters tall and weighing 85 kilograms, Loong Pro is part of China' s first full-scale open-source humanoid robot family. With the system developed by the team, the robot can now perceive and interpret complex indoor and outdoor environments with high precision, achieving centimeter-level localization, dynamic obstacle avoidance, and smooth point-to-point navigation.
To push beyond traditional 2D navigation, researchers introduced a method that fuses visual semantics with spatial geometry to generate 3D semantic occupancy maps. From a single RGB image, the system can infer the geometry and semantic categories for each voxel in the scene. By integrating heterogeneous sensor data and adapting to different environments, the approach significantly boosts robustness and efficiency in real-world navigation.
What sets this work apart is its successful application of occupancy-based perception to humanoid robots. Conventional navigation systems often struggle in dynamic 3D settings, but Prof. Song’s team addressed this by building a dedicated training dataset from real humanoid robot sensor data and optimizing a 3D occupancy prediction model. The model delivers real-time inference at over 10 Hz with spatial prediction accuracy exceeding 80%, striking a balance between performance and computational efficiency.
This achievement represents an important step toward humanoid robots that can safely and intelligently navigate real-world environments, marking a breakthrough to advance open-source humanoid robotics.
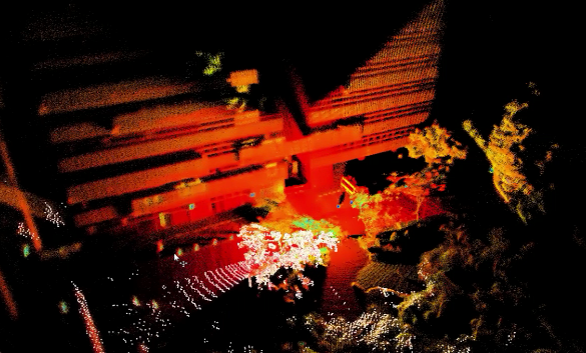
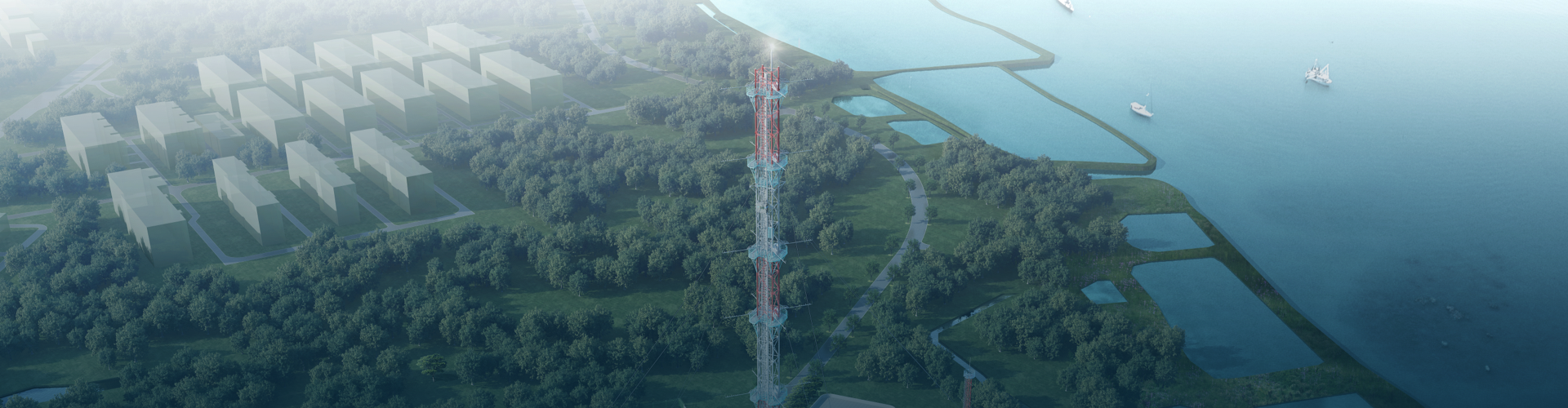
Fusion-based Localization and Mapping under Intense Outdoor Motion (Image by SONG Bo)

The humanoid robot "Loong Pro" makes its official debut at WAIC 2025. (Image by SONG Bo)