Environmental problems in the water area are becoming increasingly prominent. Many cleaning robots on water surface has been invented to clean floating garbage. However, traditional unmanned surface vehicles can only collect garbages within 3 meters in width. Is there any way to do this work more efficiently?
A team led by Dr. YU Daoyang from Hefei Institutes of Physical Science, Chinese Academy of Sciences offered their solution. The unmanned intelligence cleaning vehicle system developed by the research team, with salvage range 10 times larger than traditional cleaning vehicle, significantly improved the work efficiency and reduced the labor cost to meet the cleaning needs.
This unmanned surface vehicle system is composed of a main vehicle (10m in length) and 2 pilot subships (0.8m in length). It's like a bird with two wings.
During the operation, two subships pull the main vehicle with garbage rack. After being expanded, a trumpet-shaped collection area with a width of about 30 meters is formed, and all the garbage in this area would be caught.
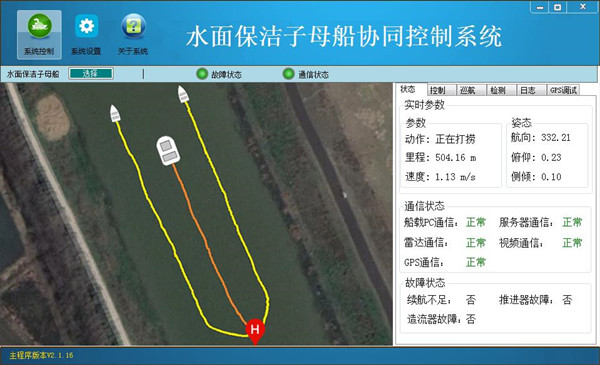
Seven months ago, the team developed an unmanned cleaning boat. This time the key point is to make the three independent vehicles cooperate. The research team proposed an adaptive Process Identification (PID) control method and geometric approximation algorithm for multi-objective coordination. With this method, the sub vehicles realized the autonomous control of the navigation route. The main and two sub vehicles can also cooperate to navigate.
Several operation modes are offered, such as river approach, river central driving, autonomous cruise, obstacle avoidance mode etc. The above operation modes can be switched freely according to the scene. All operational modes are centered on the master vehicle.
Take the obstacle avoidance mode for example, the "wing" vehicle team will take reasonable collision avoidance measures according to the encounter situation to decide whether it should overtake, follow, or slow down. In this way, each boat knows where it should and the formation can be maintained even under the comprehensive disturbance of water flow, wind and longitudinal traction.
"The cleaning efficiency is much far higher than conventional surface vehicles," said YU.
→